
UPDATE 2021-01-11: see accepted answer, the green one - usually on top.
ORIGINAL
Hi all,
As some of you know, Venus OS for raspberrypi is a hobby project by our developers, worked on in their free time.
And raspberrypi4 support has been wanted and asked for since a while now, as thats the now commonly available raspberrypi model.
We hoped and waited for someone in the community to step up and do the work, but that didn't happen. Perhaps too specialised a set of skills required (openembedded, linux, and-so-forth) - and I must admit that its quite the time investment to work on that.
Anyway, the good news is that we have a new set of images available. One image for the raspberrypi2 and 3, and another for the raspberrypi4.
So now, rather than looking to - or waiting for - the community to do the development work, we're hoping for people to do the testing work. Welcome to comment what work in your system and what does not.
Enjoy, Matthijs
Changes compared to our existing raspberrypi images:
- Update linux from 4.9 to 4.19
- The whole sdcard is now used and roughly 1/3 is assigned to /data
- both root filesystems are also increased to roughly 1/3 each
- u-boot settings are now stored redundantly on the sdcard; the FAT
partition is no longer written to.
Not much has been tested, so the question is how many thing still work.
Note: these images are intended for that, testing, don't use them in anything serious. There are no automatic updates / bug fixes e.g.
This code is open source, and the changes are in this branch: https://github.com/victronenergy/meta-victronenergy/tree/WIP_rpi4
Downloads:
- raspberrypi2 and 3: http://updates.victronenergy.com/feeds/tmp/venus-image-raspberrypi2-20200517094246-v2.60~22.rootfs.wic.gz
- raspberrypi4: http://updates.victronenergy.com/feeds/tmp/venus-image-raspberrypi4-20200517094427-v2.60~22.rootfs.wic.gz
Note that they are full images. Its not possible to install it as a .swu file. They need to be burned to an sdcard, which erases all contents on that sdcard. For detailed instructions, see the Venus OS on raspberrypi instructions.
Things to test
Report results in the comments and answers below. Always include the exact model of RaspberryPi you are using please, and just to make sure there are no confusions, report firmware version & build number of Venus OS that you are using too.
|
rpi3
|
rpi4
|
|
| Serial console (debug) |
OK (rpi3B-v1.2 by Matthijs)
|
OK (rpi4B - Matthijs)
|
| hdmi console |
OK (rpi3B-v1.2 by Matthijs)
|
Not OK (rpi4B - Matthijs)
|
| hdmi gui (remove /etc/venus/headless) |
OK (rpi3B-v1.2 by Matthijs)
|
OK (rpi4B - Matthijs)
|
| USB keyboard |
OK (rpi3B-v1.2 by Matthijs)
|
OK (rpi4B - Matthijs)
|
GPS Dongles (pls report which one you use) |
OK (rpi3B+ by PoloC)
|
|
Onboard WiFi |
OK (rpi3B+ by PoloC)
|
OK (by Innar)
|
Onboard Bluetooth (note that I don't know on which rpis bluetooth is supposed to work) |
Not OK (rpi3B-v1.2 by Matthijs)
|
|
VE.Direct USB |
OK (by Innar)
|
|
MK3-USB to a Multi |
OK (by Innar)
|
|
GX GSM |
||
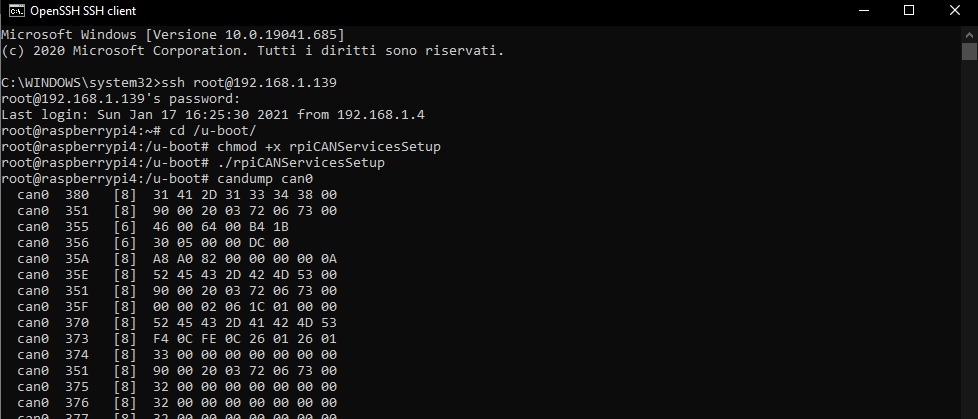
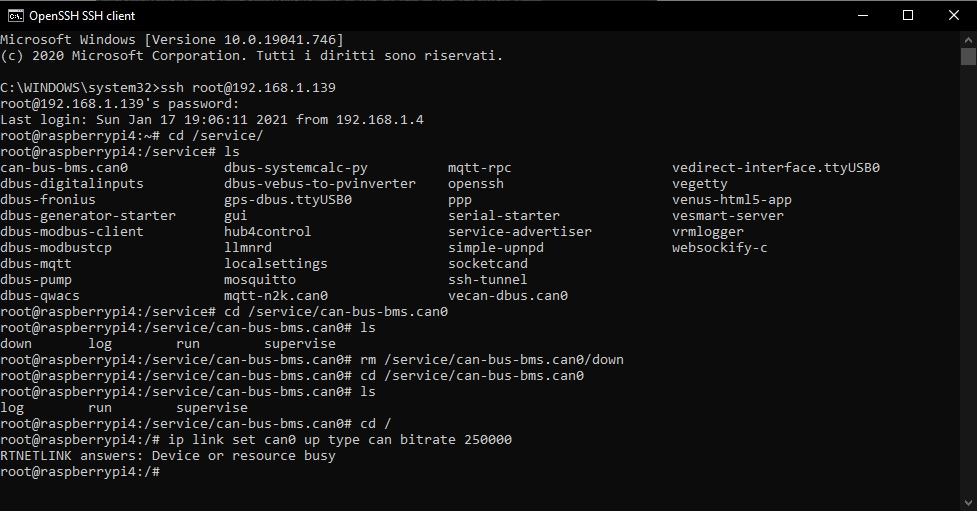
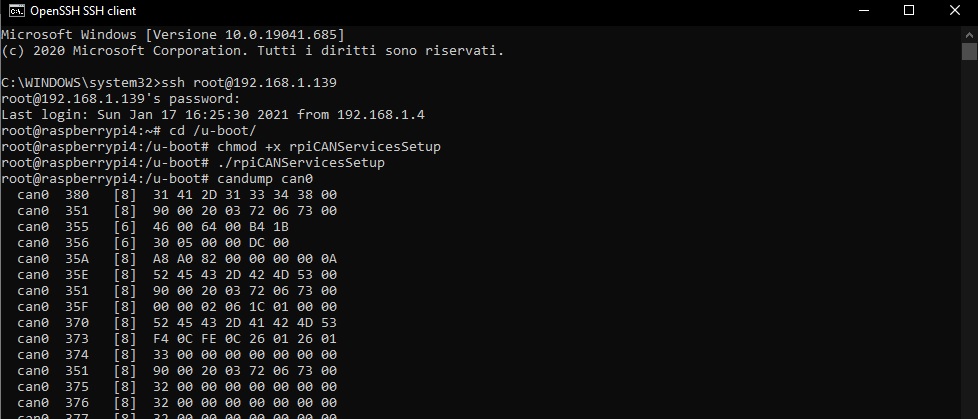
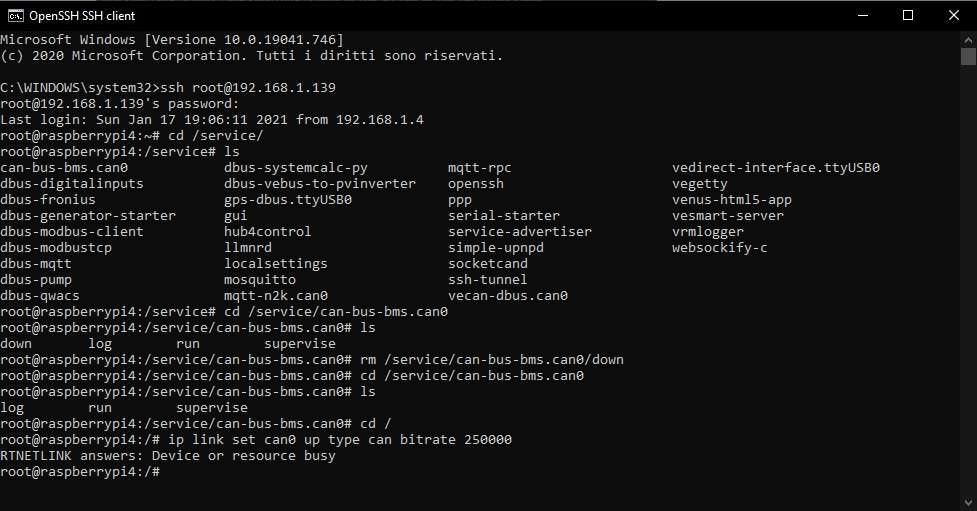
| CAN (see here) | ||
That inserting a USB stick makes VRM Logger recognise it |
OK (rpi4B - Matthijs)
|
|
| Pressing eject & then taking the stick out OK |
Not OK (rpi4B - Matthijs)
|
|
| Digital inputs | ||
| Analog inputs | ||
| Read through kernel bootlogs | ||
| .swu updating online (impossible to test for now) | ||
| .swu updating offline (sdcard or usbstick) (impossible to update for now) | ||
| booting into backup image (impossible to update for now) | ||
| Touchscreens and other add-ons that are being used | ||
| Logging to VRM (and thus DNS) |
OK (by Innar)
|
{kind=link}
{kind=link}