I have a rather large battery bank (10584ah with 7200amps of discharge limit) and venus showing wrong values: Something is limiting the numbers shown in CCL and DCL
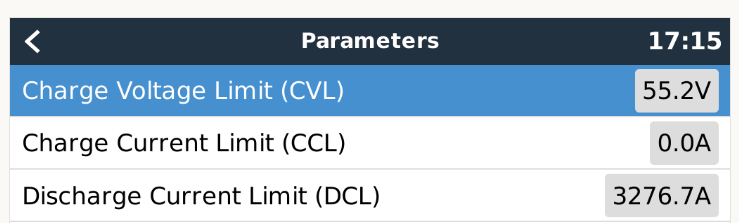
(CCL is zero here because batteries are full, sorry for bad timing of the screenshot)
So the DCL is 3276.7 which is wrong, the correct number should be 7200amps.
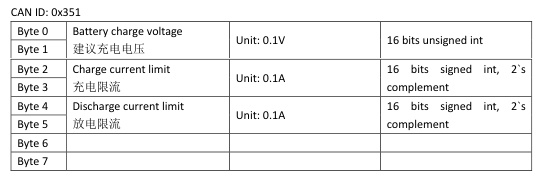
(BTW, this number is obviously 2^15=32768 divided by 10)
Something seems to limit this number, it could be:
- Venus OS
- Venus GUI
- CAN BUS encoding
- BMS sending wrong values
Does anybody know where the limit comes from?
How can I dig deeper to find out?