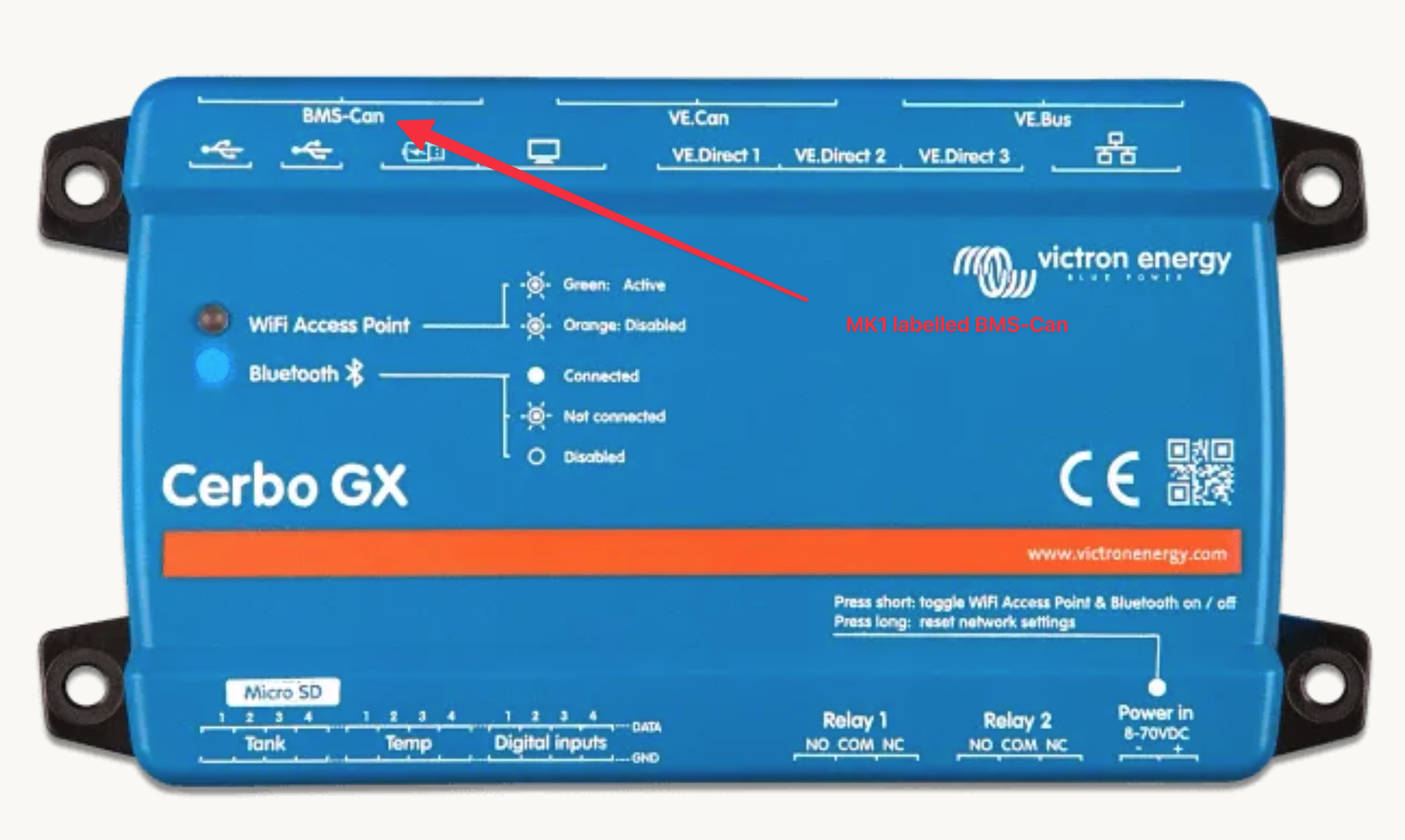
1. Is the BMS-CAN a real CAN port based in CPU hardware?
I am aware that you have fixed this port to 500k in your task SW.
2. Why is it being driven by a serial port in SW? NMEA - I do not need
/usr/bin/slcand -o -f -t hw -S 1500000 /dev/ttyS3 can1
3. Why does this slcan task load every time CAN1 port is enabled , EVEN when the CAN1 port is disable in GX services menu?
4. What in your opinion is the best way to disable this task to free up the port for exclusive use by other SW.? ( remove from services? )
Currently it is able to send CAN frames from other tasks but has to share the port ; SLcan task has some kind of filtering to block or grabs the RX frame data before other tasks can access this. Blocking this slcan task could solve my problems with this port.
Note: I am accessing the port directly and configuring it outside of your SW.. The port is needed for additional CAN bus battery module stacks in a three phase system using victron gear. We have already used CAN0 (Ve.CAN) to its limit and need the second CAN port.
regards