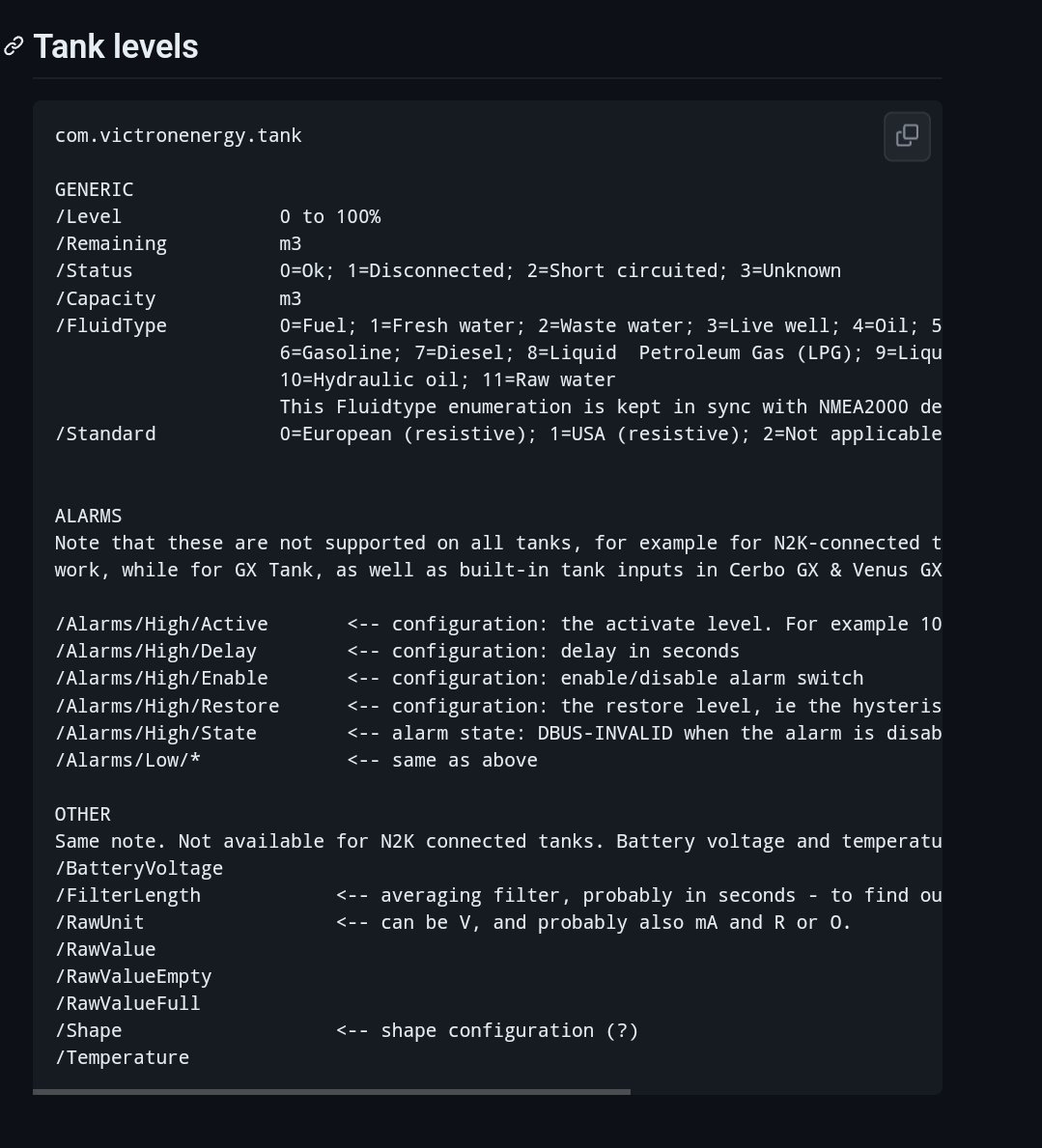
I have one of those radio linked floating sensors that gives a bar graph display of the level, but it's not very accurate, I would like an accurate display of my heating oil on the Cerbo, but after an hour of searching and reading all I find is water and LPG tank sensors?