Good evening all,
New version, fixing the tank issue as reported in the past 24 hour.
In case you don't know what this message is about, then please start with reading this link, which explains the Venus OS beta program.
Changes compared to the previous test version, v2.80~42, are:
- Fix issue causing the bouncing sensor settings for low/high limits. Thank you @Mark Maritz & @rzaenger for the quick return. And apologies for needing a second iteration on this one.
I've added the full v2.80 draft changelog, as well as all other texts below. Its all still the exact same text.
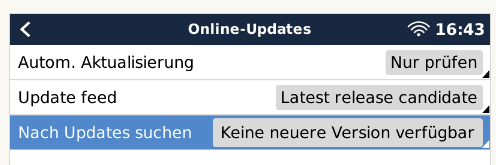
Current first possible official release for v2.80 is coming Monday or Tuesday.
All the best, Matthijs
v2.80 summary
The version we're working on, v2.80, has various highlights: the new AC Load monitoring, the new DC metering function, and also various improvements to the HTML5 MFD App including addition of translations, added support for the Ruuvi Tag wireless temperature sensors, and since this version it adds relay control by temperature.
What to test?
Same as before: the new features I mentioned in the above summary as well basically everything. And the wifi + bluetooth on the Rpi4.
There are several major changes in v2.80, which can each make things break in unexpected places. For those interested in the details, the changes I'm referring to here are (a) that the used Python version has been updated from 2.7 to 3, (b) the Open Embedded release was upgraded from Zeus to Dunfell, and we changed to a read-only rootfs. Also, various application level changes that reduce the CPU load per Victron device, useful when connecting many solar chargers for example, were made. That caused some regressions earlier, which are now fixed.
How to post an issue?
Preferably all issues are organised as answers to this question. One answer per issue. So first check the existing threads. If you have the same as someone else already reported, welcome to add a comment saying "me too". And preferably some more details. And in case its not listed yet, add a new Answer. Note that Answers and Comments are two different things here on community.
Lastly, please first revert to v2.73, to double check if the issue you're seeing was present there as well. Regressions require a different treatment than other issues and bugs, and one of the first things that needs doing in triaging a report is distinguishing between the two.
Full change log - compared to v2.73
Main new features:
- Add support for the wireless Ruuvi temperature sensors, which also measure humidity and air pressure. Data is available in the GUI, as well as on VRM. The Ruuvi sensors are available for sale via www.ruuvi.com, Victron is not stocking them. Note that while the sensor itself also reports movement aka acceleration data, that information is not available within Venus OS.
- Add DC load monitoring, and production. Details below.
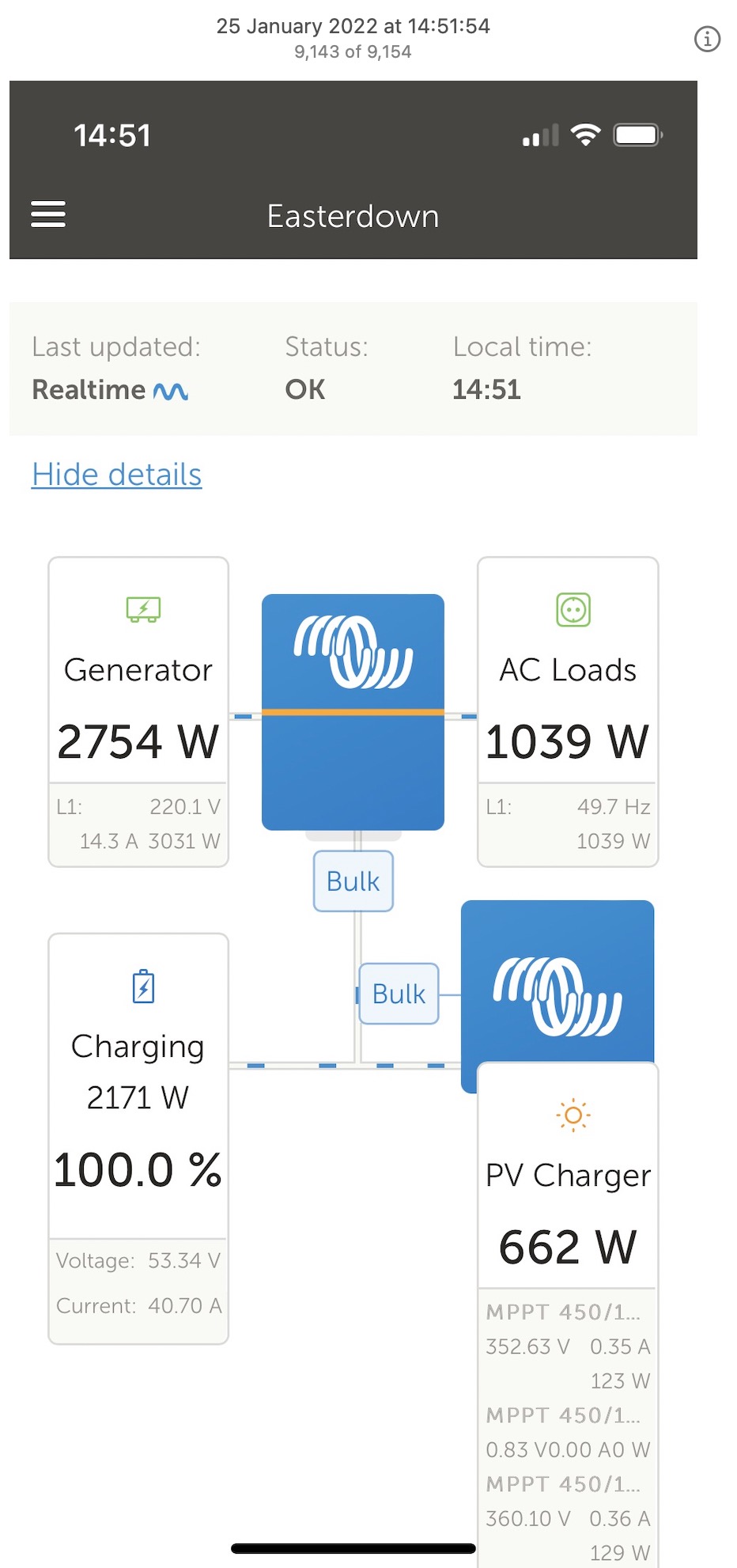
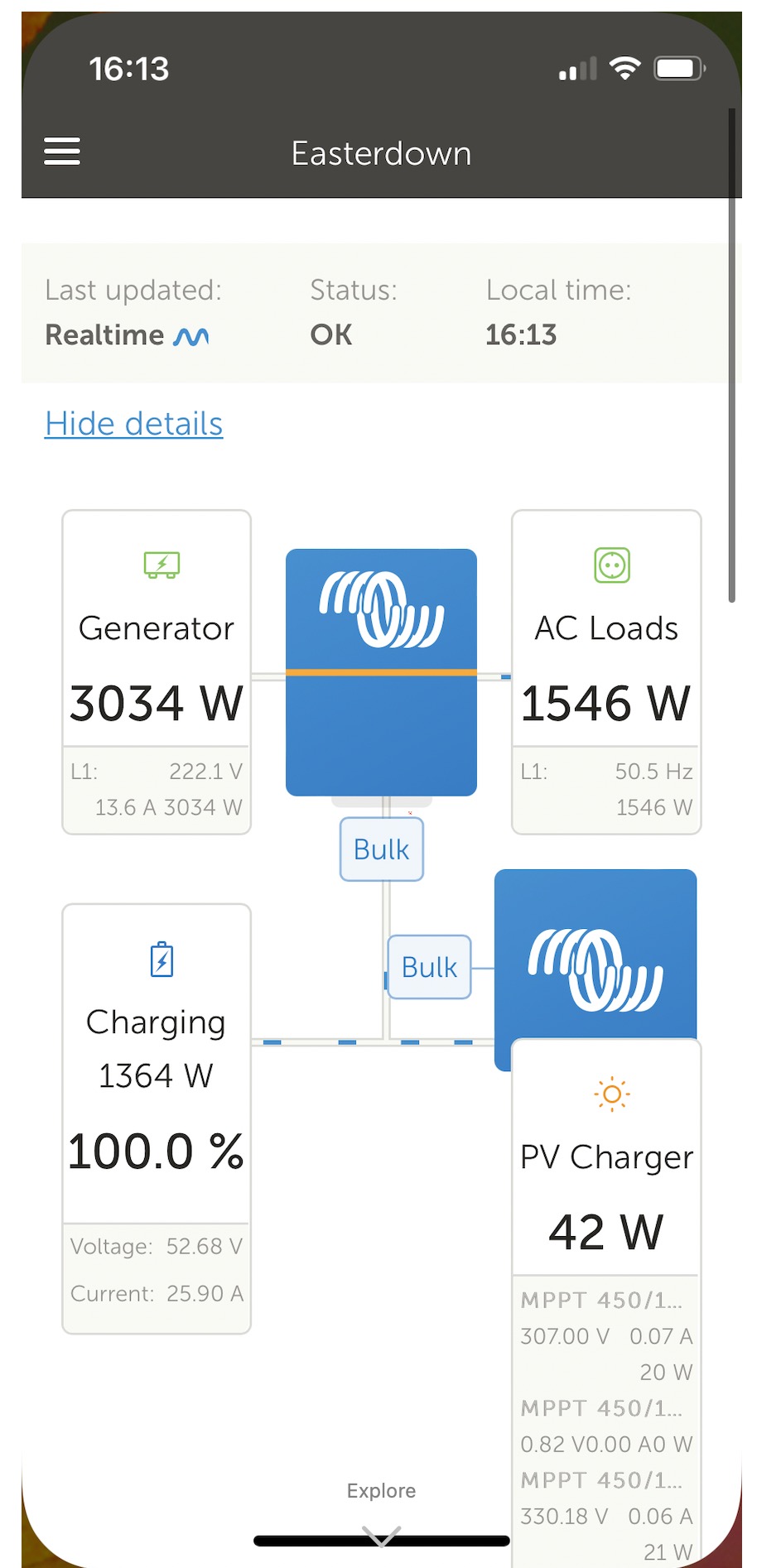
- Add AC load monitoring. Details below.
- Add preliminary support for the new Multi RS. Note that this is incomplete.
AC Load monitoring details:
- All energy meter types can now be configured to a new "role": AC Load monitor. This is done in the menu where you also choose between Grid, PV Inverter and Generator. With AC Load monitor selected, the load will be shown in the Device list. Note that we still need to work on VRM for this (add it to the Advanced page, and perhaps elsewhere as well), and also note that measured loads are not used in any calculations.
DC Load monitoring details:
- SmartShunts and BMV-712s can now be configured to be a DC Energy Meter, rather than a Battery Monitor. Two things happen when one or more SmartShunts are configured as such: (1) the power shown in the DC system box is the sum of powers reported by all SmartShunts configured as such. Allowing multiple meters is done to accommodate for example a catamaran, then you can measure the DC Systems on Port side and on Starboard side. Use the Custom name setting to give each of the meters configured as DC System their own name. (2) the DC System Current is being compensated for when setting DVCC charge current limits to Multis, Quattros and Solar Chargers. Which in more detail mains that for example when a load of 50A is being measured, and CCL by the battery is 25A, the limit given to the Multis & Solar Chargers is 75A. A valued improved for systems with significant DC loads such as Yachts, Coaches and RVs.
Notes and limitations: (A) instead of a SmartShunt, also a BMV-712 can be used. (B) Setting it to be a DC System is done in the settings of the BMV/SmartShunt itself. (C) The NMEA2000-out feature does not support these new types, for example when using a SmartShunt to measure output of an alternator, that data is not made available on NMEA2000.
DVCC and managed batteries, connected by CAN-Bus:
- Force DVCC settings for Pylontech batteries as per documentation (DVCC on, SVS and STS both off). This is now the same as already in place for various other battery makes.
- Detect- and for good settings for- BMZ ESS Batteries: DVCC=ON, SVS=Off, STS=Off
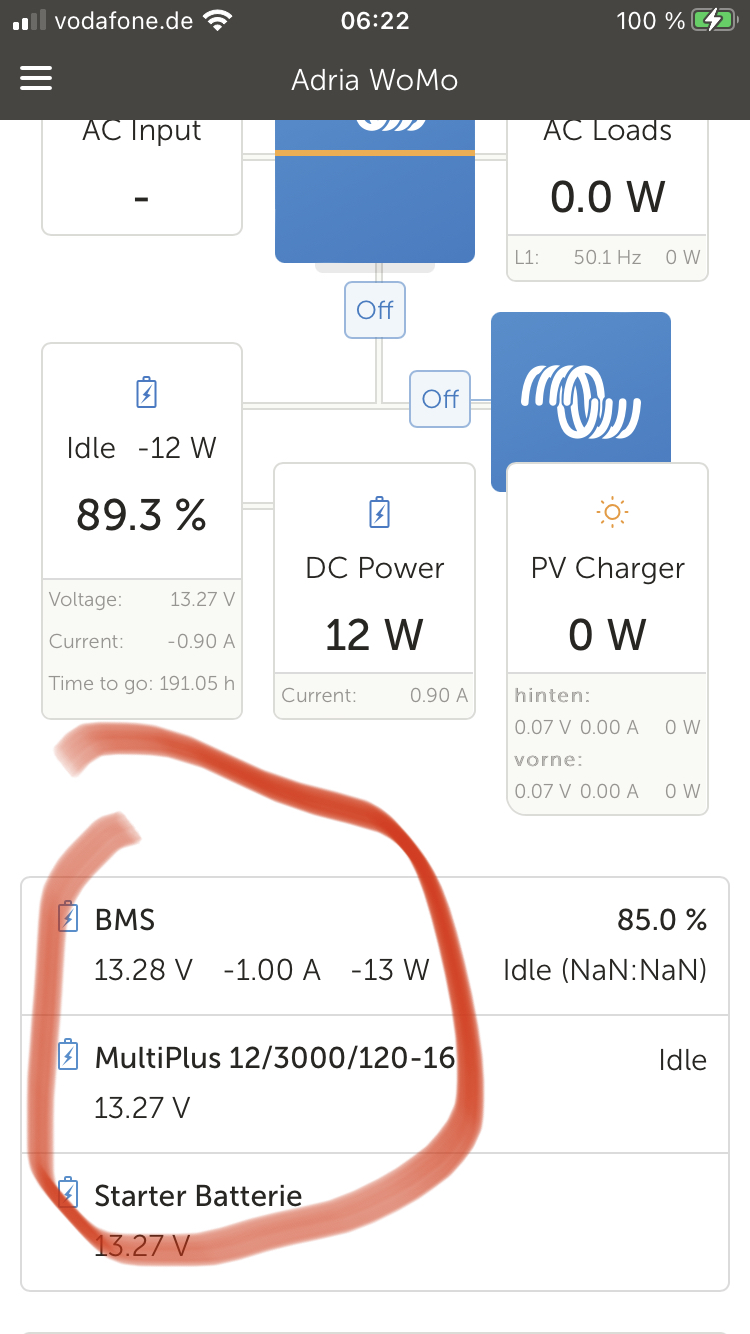
- Force-enable SVS for the Lynx Smart BMS
- Add custom name support: user and installer can configure a name for the battery. This name is stored on the GX device.
- Only use the selected battery monitor; affects systems that have a managed battery and a BMV (or similar) Victron battery monitor installed.
- Fix bug: Shared Temperature Sense did not work between an temperature sensor attached to the GX device and VE.Can devices. Bug in Venus since v2.40.
- Automatically switch to charging if a grid connection is available and a managed battery requests charge. Currently only Pylontech and some BYD batteries support a charge request indication
- Stop solar chargers when the BMS is disconnected in an ESS system. Solar chargers will show error #67 – No BMS.
ESS:
- Change the "Total of all phases" mode to be symmetrical: all phases are adjusted to convert the same amount of power from, as well as to, DC. In the past, this option primarily avoided passing power through the DC-bus to avoid inefficiency, but didn't take full advantage of the billing arrangement to use all the available power when there is a shortfall on another phase. Now it divides the work equally across the phases, thereby making the full inverter capacity available, and with no impact on billing. More detailed text on the Community v2.80~16 beta announcement, and soon in the manual.
VRM Portal:
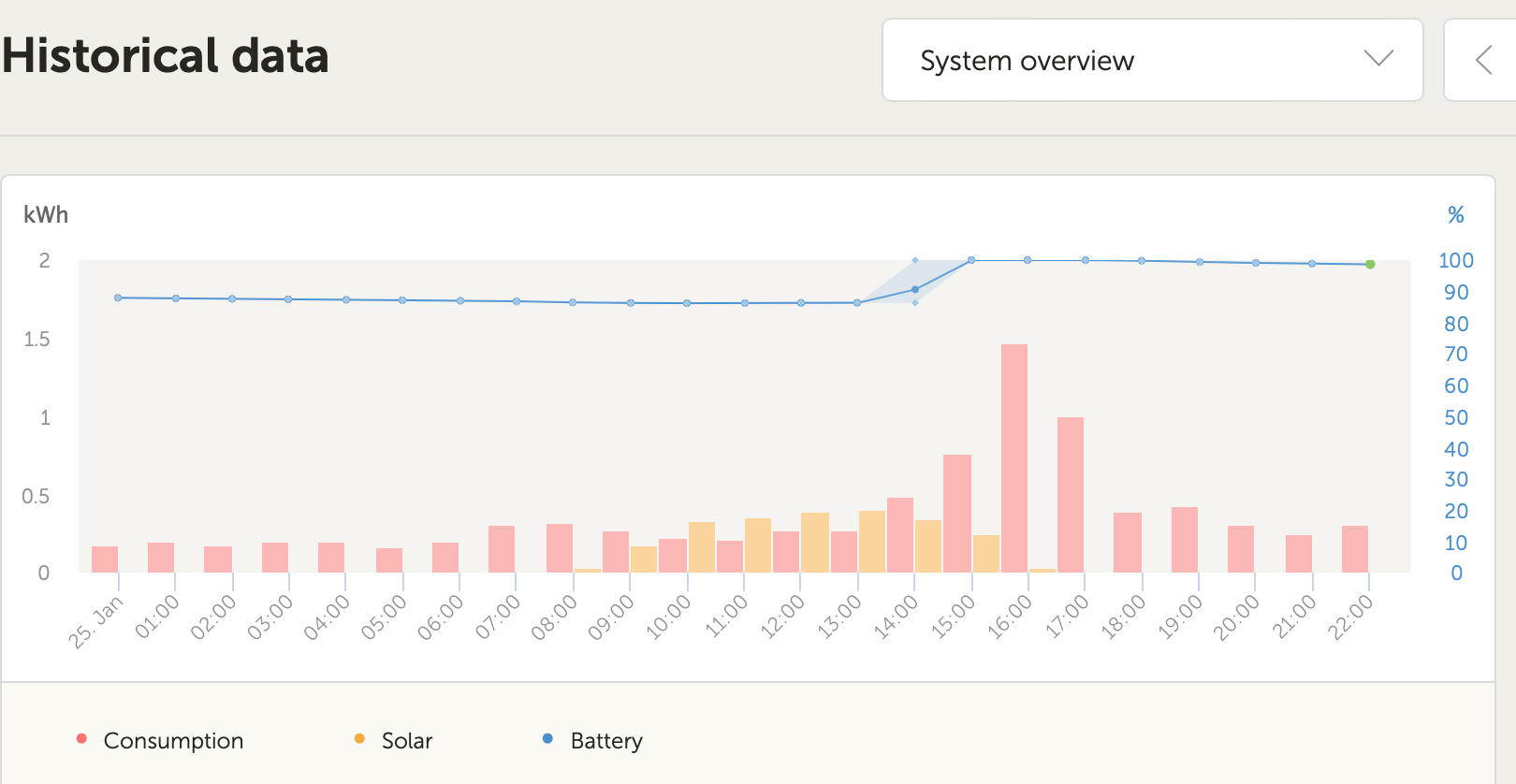
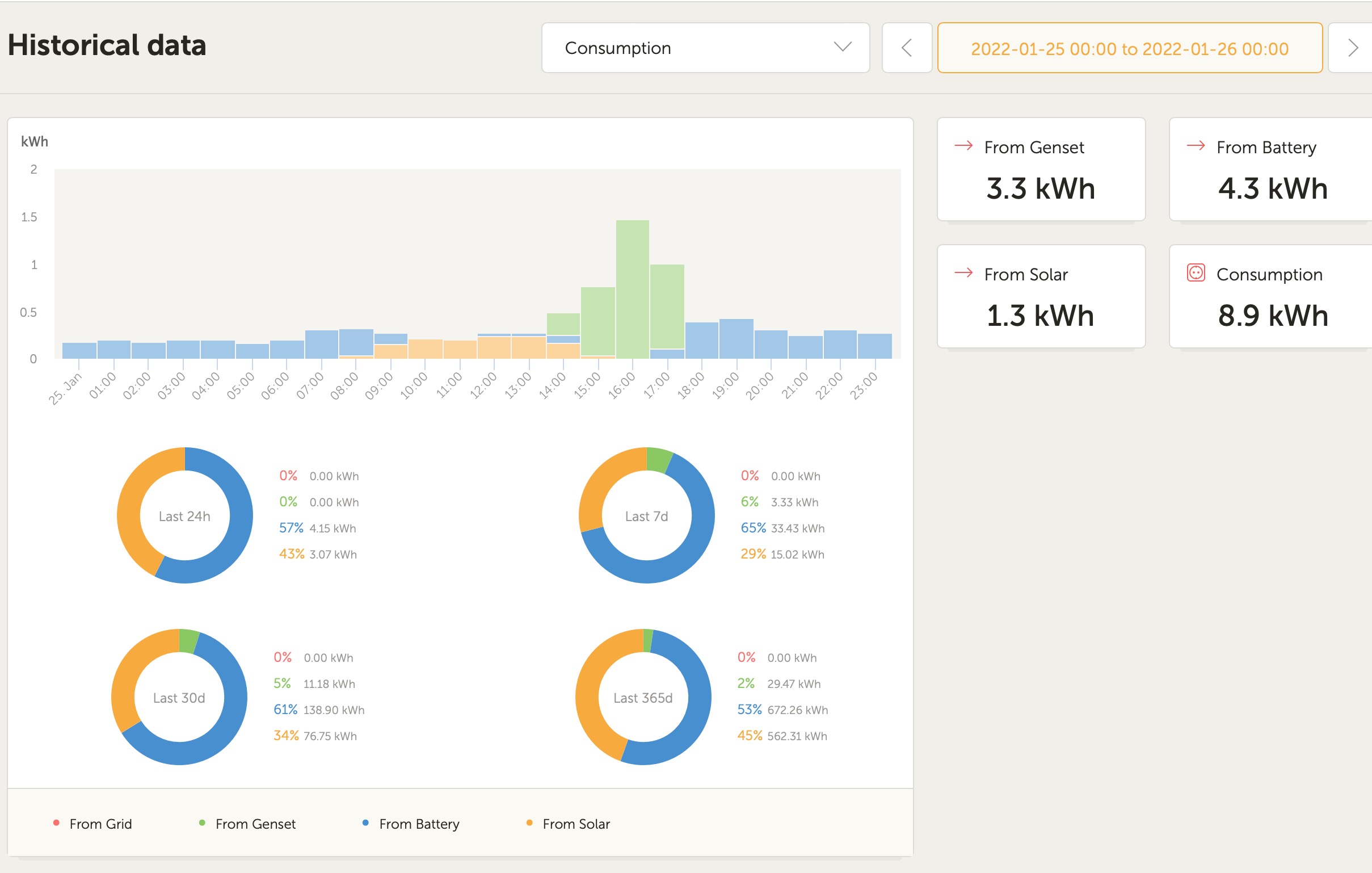
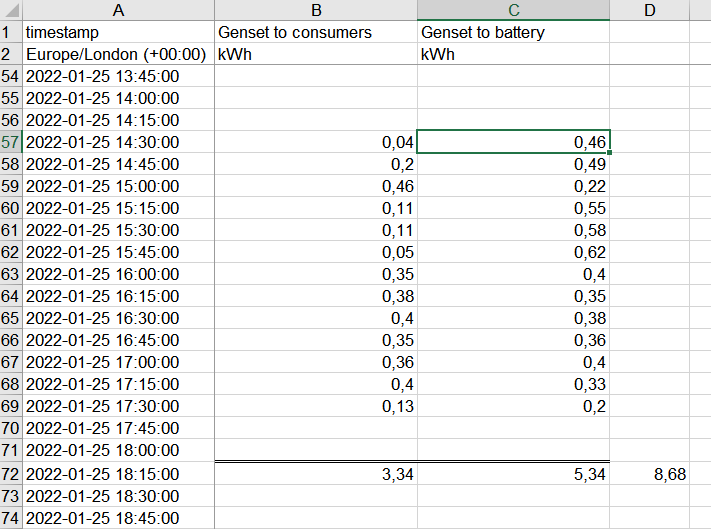
- Add information to show detailed Generator information (running/not running, last run, why its running, and more) on the VRM Portal Dashboard, when enabling the Detailed view.
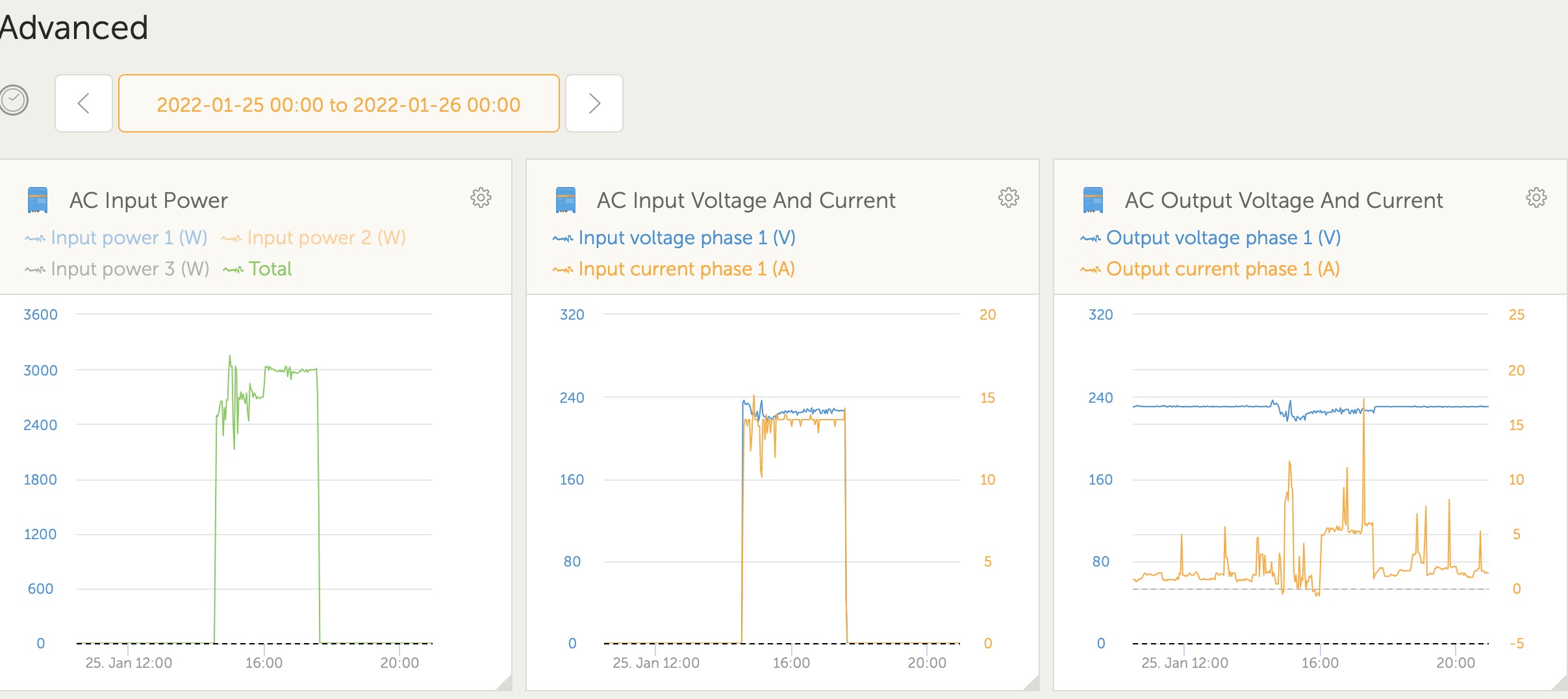
- Add information to show detailed information about AC input (grid/shore) as well as AC Loads. Includes frequency and other information.
Inverter RS:
- complete the support for the Inverter RS. Includes DVCC, control by managed batteries, SOC sync and Extra battery current, showing its error code.
- remove support when connected on VE.Direct. From v2.80 onwards, the only working connection for an Inverter RS to a GX device is on a VE.Can network.
MultiPlus-II 2x120V:
- Show output current & power on the second leg, as well as transmit that to VRM for logging and visualisation on the dashboard.
HTML5 Marine MFD App:
- Fix Garmin MFD issue that appeared in a certain start-up sequence, this issue most likely existed in the design since the beginning.
- Show the inverter/charger widget even when the AC Inputs are configured to Generator or Not available.
- Fix fault description for non-VE.Bus chargers
- Fix on/off state buttons for non-VE.Bus chargers
- Add lock button that helps prevent accidental button presses like "Start generator" or "Multi Off".
- Add Dutch, Chinese, French, German and Italian to thelanguages.
- Add a placeholder & message in case no data is present.
- Add 3A button to the input limit selector.
- Hide 3rd phase in case of a split-phase system.
- Fix keyboard buttons not working in Remote Console.
Various:
- Reduce GX device CPU load for many system types.
- NMEA2000-out: fix Solar sender DC instance storage to non-volatile memory. This never worked right, until now.
- Update recognition of Fimer grid-tie PV Inverters: Fimer recently acquired ABB and is now updating the names and recognition strings in the code.
- Increase the maximum possible power value for starting a generator, was 100kW now 1MW. Thank you Jens-Uwe P for reporting.
- Tank inputs on Cerbo GX and Venus GX: increase max tank resistance to 300 Ohm, thank you Alex Muir for asking.
- Improve WiFi recovery from Failure status.
- Improve ET340 in combination with Zigbee link, when installed in a lossy/noisy environment.
- Fix connection issue with FzSonick batteries, using the RS485-USB cable. Issue was introduced in v2.73.
- Support exfat filesystem, for large removable media (sdcards, usb sticks). Note that this is not for the raspberrypis, since (only they) still ship with a version of Linux that does not support exfat.
- Remove transmission of load averages to VRM. Those values, visible on the diagnostics page on VRM, are not used, confusing, and the D-Bus RTT time is a much better indicator of (over-)load of a GX device, hence remove them.
User interface (CCGX, GX Touch, Remote console):
- Add eject button to the offline firmware update menu.
- Fix issue that caused the overview to change when switching off the Multi in a system configured for ESS
- Fix an issue where the grid meter reading disappeared from the gui when the Multi is off
- Slightly renamed a few VE.Bus errors and error 8 & 11 detailed status codes to be less ambiguous. And VE.Bus error 15.
- Wifi menu: ask for confirmation before forgetting/disconnecting from a network, as well as before disabling the Access Point; to prevent accidental locking oneselves out, especially when remote.
- In the WiFi connection menu, give so-called hidden WiFi networks a name (their mac address), so that they no longer appear as empty rows in the menu.
- Fix missing "Recharge" text in ESS BatteryLife state field. It said "Uknown" since Venus OS v2.20.
Bluetooth:
- Fix Bluetooth pincodes starting with a 0; this was broken since the first release of BLE functionality in Venus OS.
- Implement keep-alive functionality: improves robustness with certain phones by avoiding Venus OS thinking its still connected and then remaining connected while its not.
- Fix GX device not being visible on other phones while already connected to one. Now it is visible in the 2nd phone, but then with an explanation that to connect, the other phone needs to actually disconnect first. This is now on par with how other Victron products work with Bluetooth.
- Improve compatibility with USB-bluetooth dongles, relevant for CCGX and Venus GX.
Developers, ModbusTCP, Node-RED, MQTT:
- Removed the Pv/Current path aka register from our internal databus. D-Bus. Going forward, to use that, you need to calculate it by dividing the power by the voltage. Affects all APIs, including Modbus-TCP.
- Fix the definition for Modbus-TCP register 2710 (DVCC override charge voltage). Since the mistake rendered it largely useless, and this is a fairly new register, no new register is allocated.
- Change the rootfs to be default read-only. Careful, this is quite the change in case you're modifying your rootfs. The reason behind this is quality and robustness. Every boot is now the same, instead of an initial boot possibly being different from the second or the third. And less writes to the storage, which reduces the wear, and more advantages. The downside is obviously that its a bit more hassle in case you want to modify the software. To learn how, read this commit.
- Change the used Open Embedded release from Zeus to Dunfell. More details about OE releases are here. Dunfell is relatively recent LTS (long term support) version. The expectation is to be able to stay at Dunfell for quite some time to come.
- Change the used Python version from v2.7 to v3.. This was something we needed to do anyway, and sort of a requirement that comes with switching over to Dunfell. For those that wrote their own code this does mean work. See also this post on community.
- Enable https support for php
 Hey,
Hey,