
Hi !
Im about to implement a Pylontech US2000 CAN implementation for my currently unsupported batterypack. Basically a translator from the unsopperted CAN messages -> Pylontech compatible messages.
From the Pylontech specification i know that the following values are transmitted via the CAN bus:
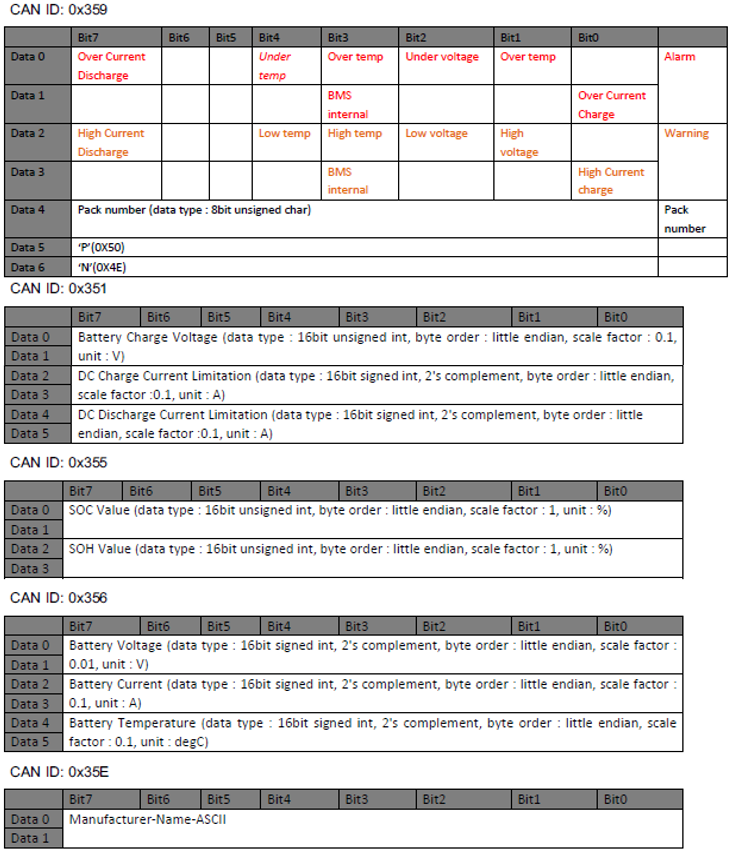
To avoid overengineering, which messages is the GX using e.g. to control the MultiPlus 2 and what will be discarded?
Thanks in advance!
Dirk