Hello!
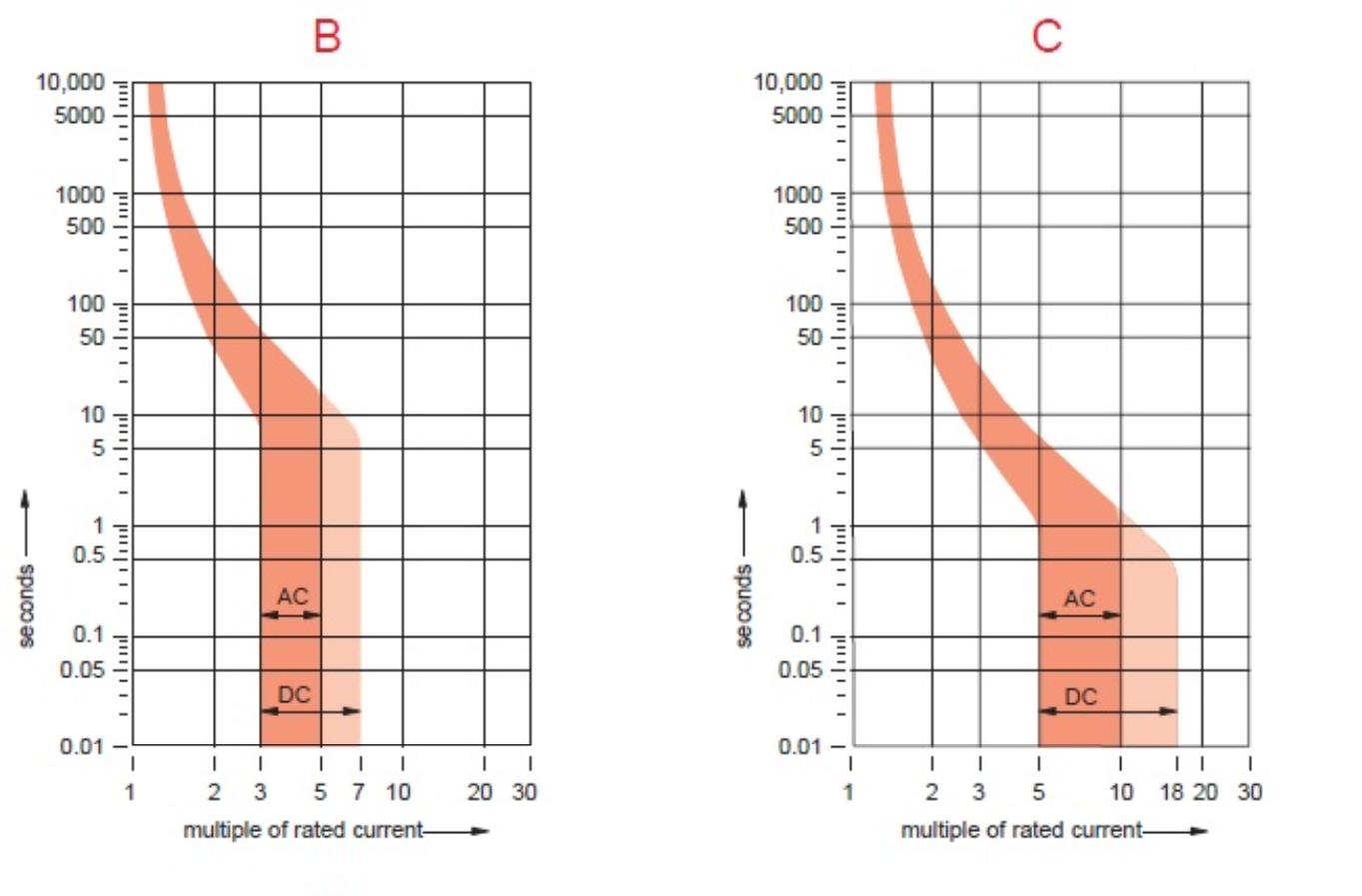
Could you please advise for MCB amperage and tripping curve (B or C) should I use with the RS Inverter 48/6000?
In the users manual and datasheet it tells lots of scenarios regarding AC output capacity, so it is not very easy to decide:
users manual, chapter 2.3 says:
- peak power: 9000W (50A) for 3 seconds - which is kind of controversial, because 9000W / 50A is 180V, not 230V...
- cont. power: 5300W
- cont. power with solar boost: 5800W
datasheet:
Maximum continuous inverter current: 25 Aac
Peak power: 9000W for 3 seconds, 7000W for 4 minutes
Short-circuit output current: 45A this info is also controversial, because in the manual it says peak power 50A for 3 sec...
So, what MCB should I use? C25A would be suitable?
Thank you!
Best regards,